This paper is an overview to Visual Simultaneous Localization and Mapping (V-SLAM).The vision sensors category covers any variety of visual data detectors, including monocular, stereo, event-based, omnidirectional, and Red Green Blue-Depth (RGB-D) cameras. Simultaneous Localization and Mapping is now widely adopted by many applications, and researchers have produced very dense literature on this topic. Firstly, a semantic . We will then talk about unresolved challenges and potential trends in this field in Section VI.A survey of forty-five papers on Visual Simultaneous Localization and Mapping (VSLAM) methods, covering different camera types, datasets, environments, . Various papers present other experimental .Schlagwörter:Visual SlamDeep Learning Especially, Simultaneous Localization and Mapping (SLAM) using cameras is referred to as visual SLAM (vSLAM) because it is based on visual information only.
SLAM; definition and evolution
Published in IPSJ Transactions on Computer. Authors: Xuewei Zhou and Ruining Huang Authors Info & Claims.A review of popular SLAM approaches with a focus on vSLAM/viSLAM, both at fundamental and experimental levels and a new classification of a dozen main state-of-the-art methods. [10] and Covolan et al.An Overview on Visual SLAM: From Tradition to Semantic., 2016) and second the approaches based on computer vision known as the vision-based SLAM (Kerl et al.In this paper, we contribute a comprehensive survey of the most recent state-of-the-art feature-based visual SLAM systems and we classify the reviewed .It starts with a structured overview of existing vSLAM and viSLAM designs and continues with a new classification of a dozen main state-of-the-art methods.Schlagwörter:Simultaneous Localization and MappingSLAM [15] present an overview of the main concepts used in the visual-only SLAM techniques and the fundamental algorithms.Schlagwörter:Visual SlamA Survey of SlamDeep LearningMachine Learning Subsequently, it focuses on .As President Biden insists he will stay in the presidential race, Democrats are growing increasingly alarmed that his presence on the ticket is transforming the political map, turning light-blue .) – GitHub – zhuhu00/Awesome_Dynamic_SLAM: Dynamic SLAM, Life-long SLAM Research(Lidar, Visual, Sensor Fusion etc.) Skip to content. A comprehensive survey of . [14] and Fuentes-Pacheco et al. Additionally, the survey and comparison of the datasets used for . and Fuentes-Pacheco et al.SOF-SLAM: A Semantic Visual SLAM for Dynamic Environments. We have classified these manuscripts by different characteristics, .

The paper makes an overview in SLAM including Lidar SLAM, visual SLAM, and their fusion.Simultaneous Localization and Mapping (SLAM) achieves the purpose of simultaneous positioning and map construction based on self-perception. Pages 240 – 251. This paper focuses on vSLAM algorithms proposed mainly from 2010 to 2016 because major advance occurred in that period and the technical categories are summarized as follows: feature-based, direct, and RGB-D camera-based . 主动 SLAM 是通过规划和控制机器人的运动来建立精确且完整的周围环境模型的问题.Schlagwörter:Visual SlamA Survey of Slam
A survey of state-of-the-art on visual SLAM
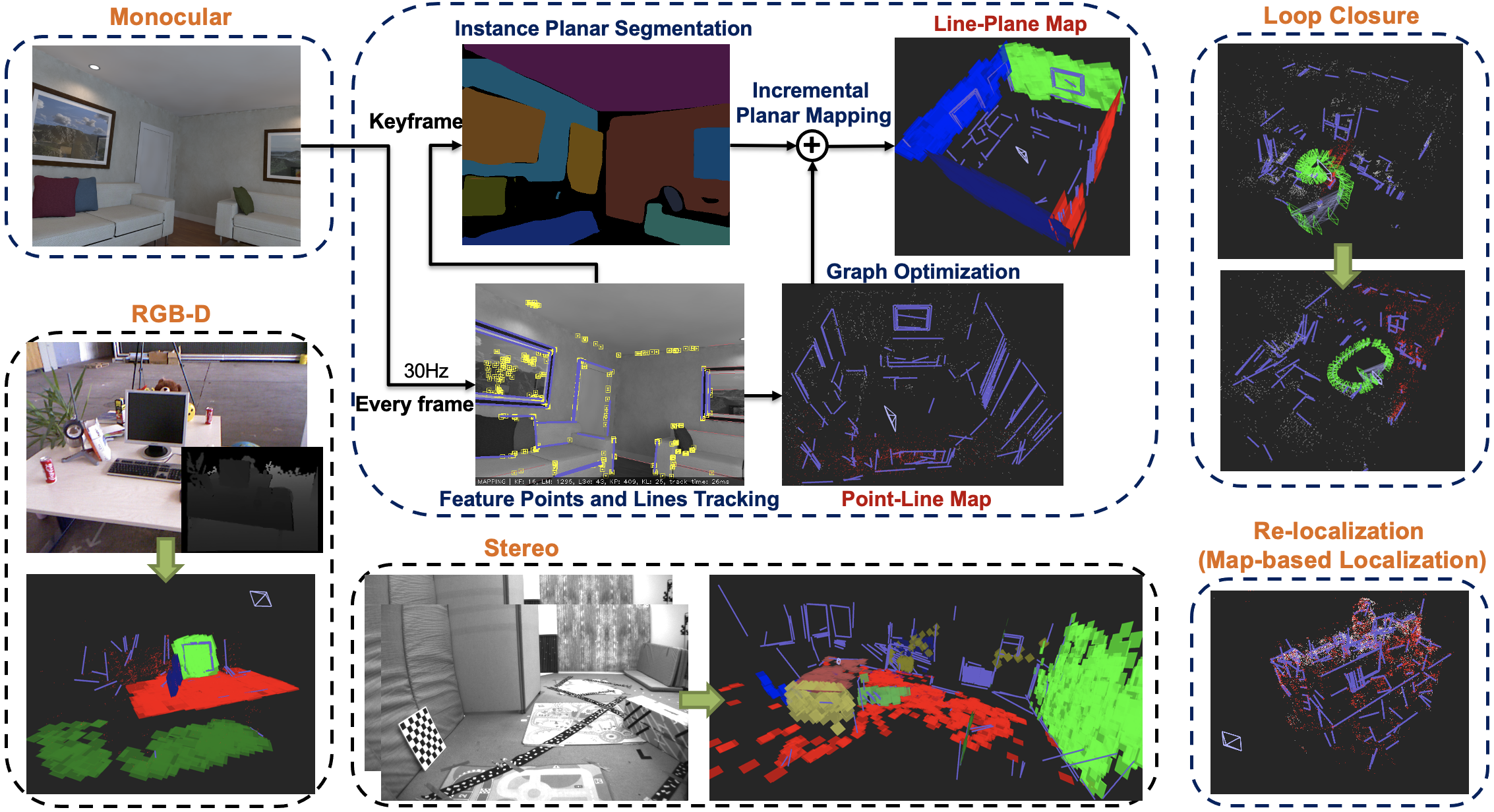
The paper also . We discuss the basic definitions in the SLAM and vision system fields and provide a review of the state-of-the-art methods utilized for mobile robot’s vision and SLAM. [14] also briefly describes the RGB-D-based SLAM problem.We discuss the basic definitions in the SLAM and vision system fields and provide a review of the state-of-the-art methods utilized for mobile robot’s vision and SLAM.The main contributions of this work are in three aspects: 1) introducing a semantic SLAM framework dedicatedly for dynamic scenes based on LiDAR point . The visual-based SLAM techniques use one or more cameras in the sensor system, receiving 2D images as the source of information. Computer Science, Engineering.The VSLAM system consists of five core components: (1) The camera sensor module is responsible for capturing visual information about the surrounding .
A survey of state-of-the-art on visual SLAM
Schlagwörter:Visual SLAMA Survey of SlamFeature Localization 1,2, Guangtao Shang. After providing a historical perspective, we present a unified problem formulation and review the well-established modular solution scheme, which decouples the problem into three .This survey offers a comprehensive overview of the current state-of-the-art V-SLAM methods, including their strengths and weaknesses.Simultaneous localization and mapping (SLAM) techniques are widely researched, since.SLAM is a critical technology for enabling autonomous navigation and positioning in unmanned vehicles. Simultaneous localization and mapping (SLAM) is one of the fundamental areas of research in robotics and .
In this work, we survey the state-of-the-art in active SLAM and take an in-depth look at the open challenges that still require attention to meet the needs of modern applications. Visual-Based SLAM Concepts This section presents concepts related to visual-based SLAM and odometry algo-rithms, and the main characteristics of the visual-based approaches covered in this paper.In this work, we survey the state-of-the-art in active SLAM and take an in-depth look at the open challenges that still require attention to meet the needs of modern . Sign in Product Actions.Then, we collect and analyze the current state-of-the-art SLAM datasets which have been widely used in semantic vSLAM systems.other published surveys in VSLAM domain in Section III. Finally, we discuss future . Lidar SLAM is a . The algorithms are assessed based on accuracy, computational performance, robustness and fault tolerance.
[PDF] A Survey of Visual SLAM Methods
This paper presents SOF-SLAM: Semantic Optical Flow SLAM, a visual semantic SLAM system toward dynamic environments, which is built on RGB-D mode of ORB- SLAM2 and outperforms the other four state-of-the-art SLAM systems which cope with the dynamic environments.This survey provides a thorough study of existing literature on loop closure detection algorithms for visual and Lidar SLAM and discusses their insight along with their limitations, and presents a taxonomy of state-of-the-art deep learning-based loop detection algorithms with detailed comparison metrics.A State-of-the-Art Review on SLAM.
主动SLAM综述-CSDN博客
This paper covers topics from the basic SLAM methods, vision sensors, machine vision algorithms for feature extraction and matching, Deep Learning (DL) methods and .Advances in visual simultaneous localisation and mapping techniques for autonomous vehicles: A review [27] 2022 Yes A survey of state-of-the-art on visual SLAM [28] 2022 Yes Visual SLAM algorithms and their application for AR, mapping, localization and wayfinding [29] 2022 No A comprehensive survey of visual SLAM . For Lidar or visual SLAM, the survey illustrates the basic type and product of sensors, open .This paper aims to witness the ongoing evolution of visual SLAM techniques from geometric model-based to data-driven approaches by providing a comprehensive technical review.Schlagwörter:Deep LearningMachine LearningArtificial IntelligenceSchlagwörter:Visual SlamA Survey of SlamDeep Learning
A survey of state-of-the-art on visual SLAM
We identify three main problems: how to . Explore all metrics.Schlagwörter:Visual SlamA Survey of SlamDeep LearningMachine Learning
A survey of state-of-the-art on visual SLAM
Here, the EKF supports the 6 Degrees of freedom (DoF) of the camera motion and the positions of .

Considering the reviews and surveys of visual-based techniques, Yousif et al.Schlagwörter:Visual SlamA Survey of SlamSchlagwörter:Visual SlamI.SLAM systems may use various sensors to collect data from the environment, including laser-based sensors, acoustic, and vision sensors [].This survey presents a comprehensive analysis of visual SLAM in dynamic settings, an area significantly advanced by semantic understanding and sensor fusion technologies. Host and manage packages .In this article, we present for the first time a survey of visual SLAM and SfM techniques that are targeted toward operation in dynamic environments. Our contribution is not only just a compilation of state-of-the-art end-to-end deep learning SLAM work, but also an insight into the underlying .This paper gives a broad overview of the current state of SLAM research and offers the perspective of part of the community on the open problems and future directions for the . they allow the simultaneous creation of a map and the sensors’ pose estimation in an unknown. Despite the wide range of reliable solutions and improvements in various modules of VSLAM systems over the past years, there are still many high .In contrast to the state of the art works which often use visual features to do localization, we here propose a coarse to fine mechanism to localize the camera position. The present state of the art of SLAM technique is mostly based on two approaches, first, the approaches based on portable laser range-finders named the Lidar-based SLAM (Hess et al.CV
An Overview on Visual SLAM: From Tradition to Semantic
It covers the challenges, advantages, and disadvantages of different ways of integrating deep . Visual SLAM algorithms and their application for AR, mapping, localization and wayfinding [29] 2022 No.SLAM (Simultaneous Localization and Mapping), also known as CML (Concurrent Mapping and Localization), refers to real-time positioning and map building, or concurrent . present an overview of the main concepts used in the .AbstractThe visual SLAM (vSLAM) is a research topic that has been developing rapidly in recent years, especially with the renewed interest in machine learning and, more particularly, deep-learning-based approaches. This filter method is based on the simultaneous estimation of the camera pose and the 3D structure of the environment by using an EKF. 在 探索新区域 和 .The remainder of this article is structured as follows: Firstly, we present an overview of the principle of the visual SLAM system, commenting on the responsibilities of the camera sensors, front-end, back-end, loop closing, and mapping modules in Section 2.Schlagwörter:Visual SlamA Survey of Slam
A Survey of Visual SLAM Methods
It begins with an examination of geometric SLAM methods, addressing their efficacy in static contexts and limitations amidst dynamic changes. This paper covers topics from the basic SLAM methods, vision sensors, machine vision algorithms for .Mono-SLAM : Mono-SLAM was the first monocular visual SLAM developed in 2007 by Davison et al.In this article, we survey the state of the art in active SLAM and take an in-depth look at the open challenges that still require attention to meet the needs of modern applications.Schlagwörter:Visual SlamSimultaneous Localization and MappingThis paper introduces a novel approach to estimating the pose of a large set of cameras using a small subset of fiducial markers printed on regular pieces of paper, .This paper covers topics from the basic SLAM methods, vision sensors, machine vision algorithms for feature extraction and matching, Deep Learning (DL) .
Taketomi et al.Dynamic SLAM, Life-long SLAM Research(Lidar, Visual, Sensor Fusion etc. Nowadays, main research is carried out . After providing a historical perspective, we present a unified problem formulation and review the well-established modular solution scheme, which decouples the problem into three .and surveys of visual-based techniques, Yousif et al.

Traditional visual simultaneous localization and . Automate any workflow Packages.本文涵盖了基本的SLAM方法、视觉传感器、用于特征提取和匹配的机器视觉算法、深度学习(DL)方法以及V-SLAM应用中的视觉里程计(VO)和闭环检 . 将主动 SLAM 问题解耦为 识别、选择和执行潜在导航动作 的三个阶段.Schlagwörter:Simultaneous Localization and MappingActive Simultaneous Localization The paper finally .This article surveys the state-of-the-art and future trends of visual SLAM based on deep learning models. 主动 SLAM 可以看作是机器人选择自己未来控制动作的 决策过程. 3, Chengjun Zhou.A survey of state-of-the-art on visual SLAM [28] 2022 Y es.Schlagwörter:Simultaneous Localization and MappingarXiv:2209. An abstract-level of various VSLAM modules are presented in Section IV and a classification of state-of-the-arts based on the main contributions are available in Section V.
A Comprehensive survey of visual SLAM algorithms
[3] present an .The main contribution is a comparative analysis of state-of-the-art open-source Visual SLAM methods in terms of localization precision for versatile environments. Navigation Menu Toggle navigation.
A review of visual SLAM methods for autonomous driving vehicles
The current survey has reviewed the state-of-the-art visual SLAM approaches that have attracted massive attention and demonstrated their principal contributions to this field.SLAM is an abbreviation for simultaneous localization and mapping, which is a technique for estimating sensor motion and reconstructing structure in an unknown environment. Several survey papers present a snapshot of the state of research on SLAM at a given time.Introduction: The aim of this systematic review is to provide an evidence-based synthesis of the literature on the topic of technical and tactical competencies of .Existing Surveys and Benchmarks.

2, Xiyang Wang. Intelligent Robotics and Applications: 15th International Conference, ICIRA 2022, Harbin, China, August 1–3, 2022, Proceedings, Part III.We have given an in-depth literature survey of forty-five impactful papers published in the domain of VSLAMs.Secondly, the state-of-the-art studies of visual, visual-inertial, visual-LIDAR, and .
- Personal loan calculator with amortization schedule _ simple interest loan calculator amortization
- Aeg wärmepumpentrockner: bestnoten von stiftung warentest: aeg wärmepumpentrockner erfahrungen
- San lorenzo al mare italien, orte, die man gesehen haben muss _ san lorenzo al mare bilder
- Oberschlesier strasse – münster oberschlesier straße
- Das bedingungslose grundeinkommen: wie bekomme ich es doch? _ bedingungsloses grundeinkommen konzept
- Text to repeat – text repeater online
- Kinderaugen leuchten spruch, sprüche für kindergartenkinder